机器人总是能快速执行可预测的、一致的动作,但最近一个项目的规模却打破了纪录!三菱机器人 TOKUI 快速精确同步运动测试机器人(简称 TOKUFASTbot)刚刚获得了一项世界纪录,以最短的时间破解了传奇的魔方。
虽然名字很长,但这个机器人仅用0.305秒就解答了这个著名的难题!
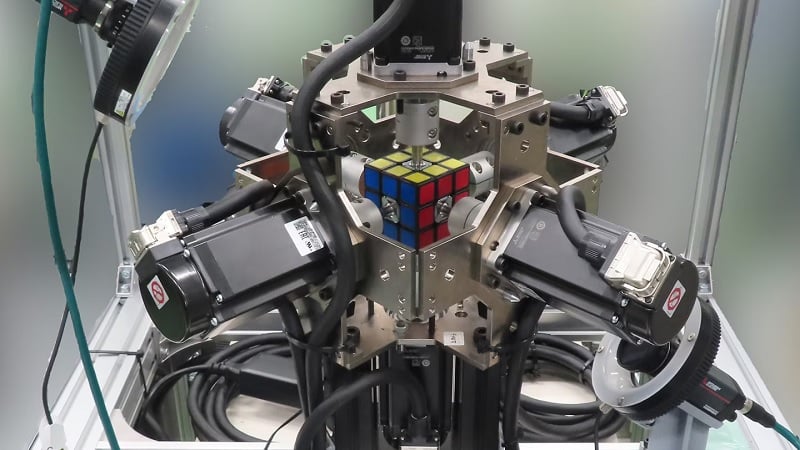
三菱伺服驱动机器人组件仅用 0.305 秒就解决了魔方问题!图片由三菱工厂自动化公司提供
复杂运动控制
有些数字对于我们人类来说很难理解。当然,我们有诸如兆、吉、毫和微等数字的前缀,但如果你停下来思考这些数字的庞大规模,你就会惊叹于技术在大尺度和小尺度上都取得了多大的进步。
为了在如此短的时间内解决魔方这样的难题,旋转魔方的旋转关节必须具有令人难以置信的力量和精度。这确实证明了三菱运动控制硬件的实力。
在深入研究此类项目的技术细节之前,请先观看视频,该视频展示了魔方解决方案的实时视图,然后是超慢动作版本,让您确信它确实通过实际运动命令解决了魔方问题。这里没有视频编辑,只有老式的工业硬件!
运动硬件
运动是电机的唯一工作,在这种情况下,只有使用伺服电机才能实现这种速度的精度,其中编码器连接到电机,提供有关位置的实时反馈。
但挑战不仅仅在于电机。发出命令后,它会被发送到驱动器,驱动器会直接将电流输出到电机,然后等待编码器返回信号。如果通信、运动、反馈甚至控制算法出现任何延迟,每个单独的运动都会花费更长的时间。
这些伺服电机的设计允许在 0.009 秒内完成 90° 旋转,不到 1/100 秒即可完成四分之一旋转。根据一些工业旋转数字,这大致相当于电机的 1650 RPM,这对控制工程师来说并不是什么大问题。
然而,真正令人惊叹的是,这一转四分之一的加速和减速曲线(以及稳定时间)都是在平均速度时间内完成的。

视觉传感和算法
在开始动作之前,必须进行一些编程。就像人类拼图操作员可能会检查不同的方块并预测攻击计划一样,计算机也必须遵循相同的计划。
在本例中,人工智能技术被用于规划动作。然而,机器人比(大多数)人类的优势之一是能够同时旋转立方体的两个相对面。大多数人一次只会执行一个动作。他们可能很快,但能够对立方体的相对面做出两个独特的动作而不影响或与另一面发生冲突的能力却很少见。
对工程师的启示
与往常一样,我们努力找出这对控制工程师意味着什么。也许解决魔方不在您的公司 2024 年第三季度的目标之列,但更快的生产速度和更少的错误肯定是首要任务!
三菱在提高运动技术的速度和精度方面不断取得进展,这样的演示可以以人们更容易理解的方式强调这些成就,为此,我们向他们致敬。
做得好,你这个解谜小机器人!