Yaskawa Motoman发布了其最新的软件开发工具包 (SDK) YMConnect,用于为 Yaskawa 机器人创建定制软件。YMConnect 是 Yaskawa 早期 SDK MotoCom 的替代和升级版。
YMConnect 的设计理念是易于使用,这意味着新技术人员可以在拥有大量文档和支持的环境中快速训练和编程机器人,而不必担心影响人员、产品和财产。YMConnect 并非要构建庞大而复杂的应用程序来运行整个制造流程线,而是旨在从机器人上的传感器获取关键值以进行评估和调整。
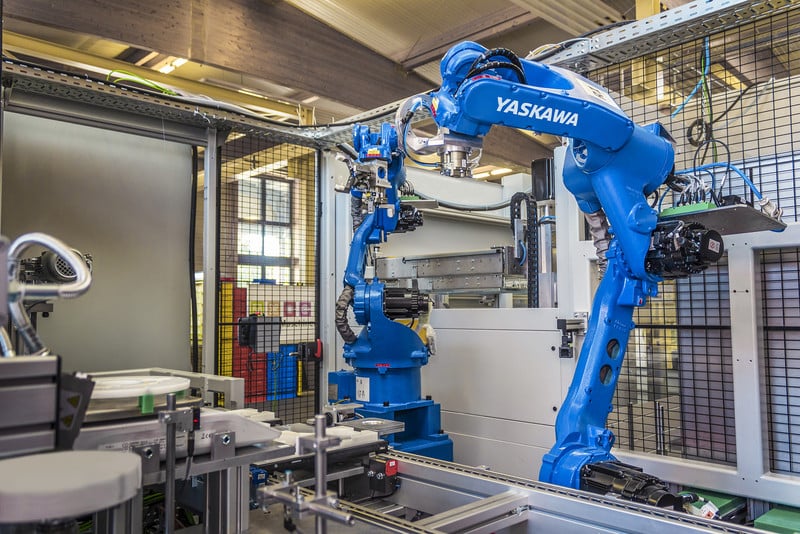
Yaskawa 的 YMConnect SDK 旨在促进与 Yaskawa 机器人的用户友好通信。图片由Yaskawa Motoman提供
YMConnect 软件开发套件 (SDK)
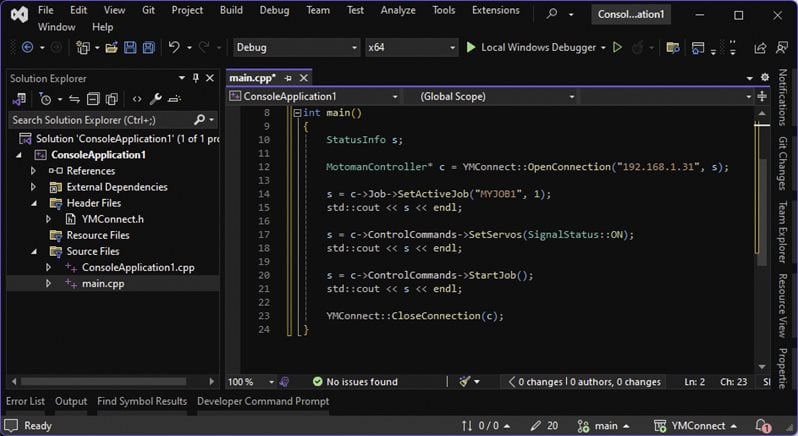
YMConnect SDK允许用户使用行业标准的 C++17 编程语言构建应用程序。在此套件中,机器人可以监控速度、位置和扭矩传感器,在运行时生成运动命令,读取和写入控制器变量,并提供几乎无限的输入/输出 (I/O)。它还可以读取轴配置信息以及操作期间可能生成的状态和错误消息。除了机器人操作之外,它还可以执行编程接口所需的所有文件命令:加载、保存和创建新应用程序。
YMConnect 的一些主要功能是它与安川机器人控制器的兼容性、易于上手以及学习如何开发满足其制造工厂特定需求的应用程序。
控制器兼容性
Yaskawa 的 YMConnect 专为在 Windows 10(或更高版本)或 Ubuntu 22.04(或更高版本)机器上运行而设计。从那里,它可以与 YRC1000(可能使用动态运动接口)、YRC1000micro、FS100、DX200 和 DX100(DS2.07.00-00 及更高版本)控制器交互。这些控制器用于许多常见的制造和运输操作,包括焊接、装配、材料去除、挑选、包装、码垛等。通信通过以太网进行,从而可以跨平台工作。

安川的机器人控制器可使用 YMConnect SDK 进行编程。图片由安川 Motoman提供
入门
YMConnect 的主要优势之一是能够通过 GitHub 分发机器人控制和监控应用程序。这不仅使用户能够将代码转移给可能正在构建类似应用程序的其他人,而且它还可以为学习 C++17 语言、排除应用程序故障和使用通用库的初学者提供有用的资源,这样就不必从头开始开发应用程序。这些优势都是通过公开的 API 实现的,其中的命令有据可查,开发人员可以访问。
机器人通信与控制
对于任何开发机器人监控和控制应用程序的人来说,任何承诺减少学习难度的新产品都会受到市场的欢迎。YMConnect 与多种常用控制器几乎无缝集成,能够从标准笔记本电脑(基于 Windows 或 Linux)运行,并且在许多常见应用程序中具有多功能性,这意味着它很可能很快在制造设施中得到应用。